Vibration of a beam clamped at one end
The beam is increasingly loaded at its other end, and then suddenly released.
Time-domain, implicit scheme
3D
Rayleigh damping
elastodynamicsx can be used to reproduce it.[1]:
import numpy as np
from dolfinx import mesh, fem, default_scalar_type
from mpi4py import MPI
from elastodynamicsx.pde import material, boundarycondition, PDE, damping
from elastodynamicsx.solvers import TimeStepper
from elastodynamicsx.utils import make_facet_tags, ParallelEvaluator
FE domain
[2]:
L_, B_, H_ = 1, 0.04, 0.1
Nx, Ny, Nz = 60, 5, 10 # Nb of elts.
extent = [[0., 0., 0.], [L_, B_, H_]]
# create the mesh
domain = mesh.create_box(MPI.COMM_WORLD, extent, [Nx, Ny, Nz])
# create the function space
V = fem.functionspace(domain, ("Lagrange", 1, (domain.geometry.dim,)))
# define some tags
tag_left, tag_top, tag_right, tag_bottom, tag_back, tag_front = 1, 2, 3, 4, 5, 6
boundaries = [(tag_left , lambda x: np.isclose(x[0], 0.)),
(tag_right , lambda x: np.isclose(x[0], L_)),
(tag_bottom, lambda x: np.isclose(x[1], 0.)),
(tag_top , lambda x: np.isclose(x[1], B_)),
(tag_back , lambda x: np.isclose(x[2], 0.)),
(tag_front , lambda x: np.isclose(x[2], H_))]
facet_tags = make_facet_tags(domain, boundaries)
Boundary conditions
Clamp the left face
Apply a load on the right face
[3]:
# Left: clamp
bc_l = boundarycondition((V, facet_tags, tag_left), 'Clamp')
# Right: normal traction (Neumann boundary condition)
T_N = fem.Constant(domain, np.array([0] * 3, dtype=default_scalar_type))
bc_r = boundarycondition((V, facet_tags, tag_right), 'Neumann', T_N)
bcs = [bc_l, bc_r] # list all BCs
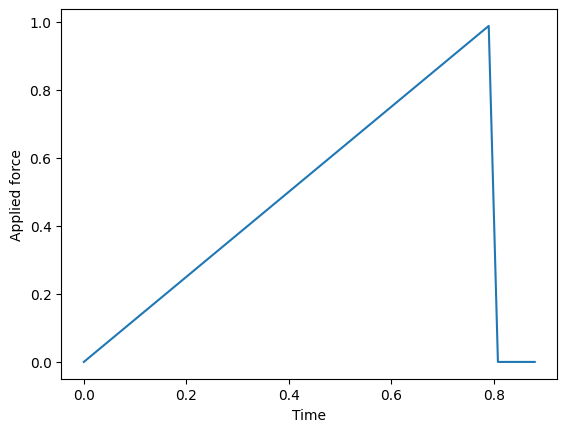
Define the temporal behavior of the source
[4]:
# -> Time function
p_0 = 1. # max amplitude
F_0 = p_0 * np.array([0, 0, 1], dtype=default_scalar_type) # source orientation
cutoff_Tc = 4 / 5 # release time
src_t = lambda t: t / cutoff_Tc * (t > 0) * (t <= cutoff_Tc)
T_N_function = lambda t: src_t(t) * F_0
if domain.comm.rank == 0:
import matplotlib.pyplot as plt
t = np.linspace(0, 1.1 * cutoff_Tc)
plt.plot(t, src_t(t))
plt.xlabel('Time')
plt.ylabel('Applied force')
plt.show()
Define the material law
isotropic elasticity
with Rayleigh damping: \([C] = \eta_M [M] + \eta_K [K]\) where \([M]\), \([K]\) and \([C]\) are the mass, stiffness and damping matrices
[5]:
# Parameters here...
E, nu = 1000, 0.3 # Young's modulus and Poisson's ratio
rho = 1 # mass density
eta_m = 0.01 # Rayleigh damping param
eta_k = 0.01 # Rayleigh damping param
# ... end
# Convert Young & Poisson to Lamé's constants
lambda_ = E * nu / (1 + nu) / (1 - 2 * nu)
mu = E / 2 / (1 + nu)
# Convert floats to fem.Constant
rho = fem.Constant(domain, default_scalar_type(rho))
lambda_ = fem.Constant(domain, default_scalar_type(lambda_))
mu = fem.Constant(domain, default_scalar_type(mu))
eta_m = fem.Constant(domain, default_scalar_type(eta_m))
eta_k = fem.Constant(domain, default_scalar_type(eta_k))
material = material(V,
'isotropic',
rho, lambda_, mu,
damping=damping('Rayleigh', eta_m, eta_k))
Assemble the PDE
[6]:
pde = PDE(V, materials=[material], bodyforces=[], bcs=bcs)
Time scheme
We use the Generalized-alpha method, which is an explicit scheme that can be viewed as an extention of the Newmark-\(\beta\) family. The parameters of the scheme are \(\alpha_m\), \(\alpha_f\), \(\gamma\), \(\beta\). Here we take:
\(\alpha_m=0.2\),
\(\alpha_f=0.4\),
while the other parameters are set by default to \(\gamma=\frac{1}{2} + \alpha_f - \alpha_m\) and \(\beta = \frac{1}{4}(\gamma + \frac{1}{2})^2\) to ensure second order accuracy, and stability. Note that stability is only unconditionnal in the linear, non dissipative case.
[7]:
# Temporal parameters
T = 4 # duration; difference with original example: here t=[0,T-dt]
Nsteps = 50 # number of time steps
dt = T / Nsteps # time increment
# Generalized-alpha method parameters
alpha_m = 0.2
alpha_f = 0.4
kwargsTScheme = dict(scheme='g-a-newmark', alpha_m=alpha_m, alpha_f=alpha_f)
# Time integration: define a TimeStepper instance
tStepper = TimeStepper.build(V,
pde.M_fn, pde.C_fn, pde.K_fn, pde.b_fn, dt, bcs=bcs,
**kwargsTScheme)
# Set the initial values
tStepper.set_initial_condition(u0=[0, 0, 0], v0=[0, 0, 0], t0=0)
Define outputs
Extract signals at few points
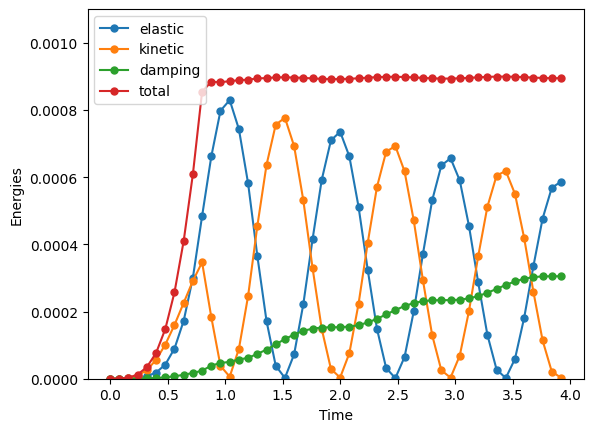
Compute the kinetic, elastic and damping energies
Live-plot results (only in a terminal; not in a notebook)
[8]:
# -> Point evaluation
# Define points
points_out = np.array([[L_, B_ / 2, 0]]).T
# Declare a convenience ParallelEvaluator
paraEval = ParallelEvaluator(domain, points_out)
# Declare data (local process)
signals_local = np.zeros((paraEval.nb_points_local,
V.num_sub_spaces,
Nsteps)) # <- output stored here
# -> Energies
energies = np.zeros((Nsteps, 4))
E_damp = 0 # declare; init value
u_n = tStepper.timescheme.u # The displacement at time t_n
v_n = tStepper.timescheme.v # The velocity at time t_n
comm = V.mesh.comm
def Energy_elastic():
return comm.allreduce(fem.assemble_scalar(fem.form(1/2 * pde.K_fn(u_n, u_n))), op=MPI.SUM)
def Energy_kinetic():
return comm.allreduce(fem.assemble_scalar(fem.form(1/2 * pde.M_fn(v_n, v_n))), op=MPI.SUM)
def Energy_damping():
return dt * comm.allreduce(fem.assemble_scalar(fem.form(pde.C_fn(v_n, v_n))), op=MPI.SUM)
# -> live plotting parameters
clim = 0.4 * L_ * B_ * H_ / (E * B_ * H_**3 / 12) * np.amax(F_0) * np.array([0, 1])
live_plotter = {'refresh_step': 1, 'clim': clim, 'window_size': [640, 480]} if domain.comm.rank == 0 else None
# -> Define callbacks: will be called at the end of each iteration
def cbck_storeAtPoints(i, out):
if paraEval.nb_points_local > 0:
signals_local[:, :, i+1] = u_n.eval(paraEval.points_local, paraEval.cells_local)
def cbck_energies(i, out):
global E_damp
E_elas = Energy_elastic()
E_kin = Energy_kinetic()
E_damp+= Energy_damping()
E_tot = E_elas + E_kin + E_damp
energies[i+1, :] = np.array([E_elas, E_kin, E_damp, E_tot])
Solve
Define a ‘callfirst’ function to update the load BC
Run the time loop
[9]:
# 'callfirsts': will be called at the beginning of each iteration
def cfst_updateSources(t):
T_N.value = T_N_function(t)
# Run the big time loop!
tStepper.solve(Nsteps - 1,
callfirsts=[cfst_updateSources],
callbacks=[cbck_storeAtPoints, cbck_energies],
live_plotter=live_plotter)
# End of big calc.
Post-processing
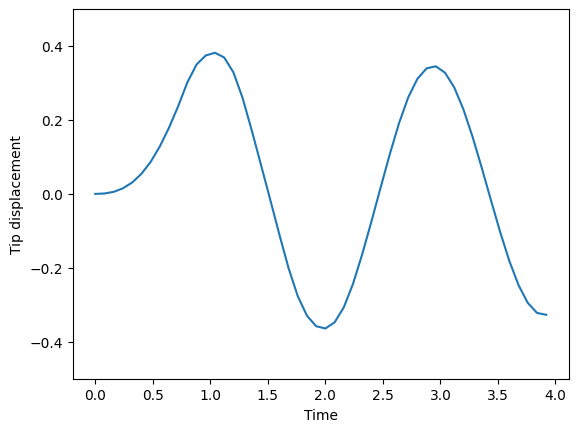
Plot tip displacement and energies evolution
[10]:
# Gather the data to the root process
all_signals = paraEval.gather(signals_local, root=0)
# Plot only on rank == 0
if domain.comm.rank == 0:
t = dt * np.arange(energies.shape[0])
# Tip displacement
u_tip = all_signals[0]
plt.figure()
plt.plot(t, u_tip[2, :])
plt.xlabel('Time')
plt.ylabel('Tip displacement')
plt.ylim(-0.5, 0.5)
# Energies
plt.figure()
plt.plot(t, energies, marker='o', ms=5)
plt.legend(("elastic", "kinetic", "damping", "total"))
plt.xlabel("Time")
plt.ylabel("Energies")
plt.ylim(0, 0.0011)
plt.show()